Deep Learning
An overview of the paper “Deep Learning”. The authors create a brief review of the current deep learning methods and future research roadwork. All images and tables in this post are from their paper.
Supervised learning
The most common form of machine learning, deep or not, is supervised learning. We compute an objective function that measures the error (or distance) between the output scores and the desired pattern of scores. The machine then modifies its internal adjustable parameters to reduce this error. These adjustable parameters, often called weights, are real numbers that can be seen as ‘knobs’ that define the input–output function of the machine. Many of the current practical applications of machine learning use linear classifiers on top of hand-engineered features, which can only capture the hyperplane. This is not useful for complicated data such as image or sounds, where no such hyperplane exists and more intricate details are of higher importance. A deep-learning architecture is a multilayer stack of simple modules, all (or most) of which are subject to learning, and many of which compute non-linear input–output mappings. Each module in the stack transforms its input to increase both the selectivity and the invariance of the representation.
Backpropagation to train multilayer architectures
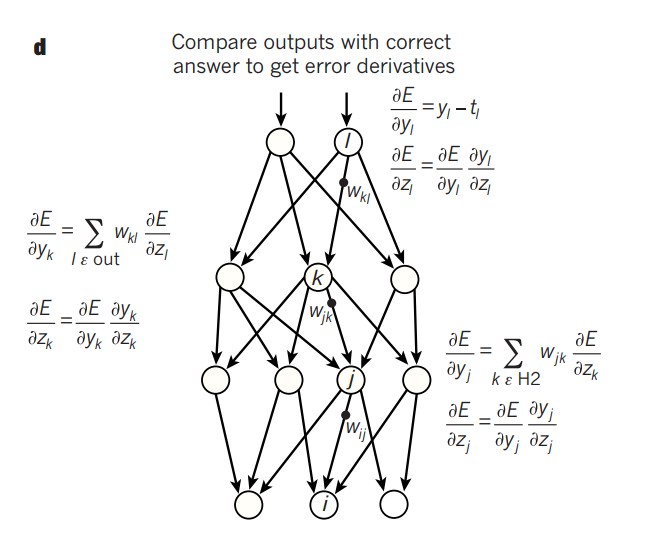
The backpropagation equation can be applied repeatedly to propagate gradients through all modules, starting from the output at the top (where the network produces its prediction) all the way to the bottom (where the external input is fed). Once these gradients have been computed, it is straightforward to compute the gradients with respect to the weights of each module. Previously, it was commonly thought that simple gradient descent would get trapped in poor local minima — weight configurations for which no small change would reduce the average error. In practice, poor local minima are rarely a problem with large networks. Regardless of the initial conditions, the system nearly always reaches solutions of very similar quality. Recent theoretical and empirical results strongly suggest that local minima are not a serious issue in general. Instead, the landscape is packed with a combinatorially large number of saddle points where the gradient is zero, and the surface curves up in most dimensions and curves down in the remainder.
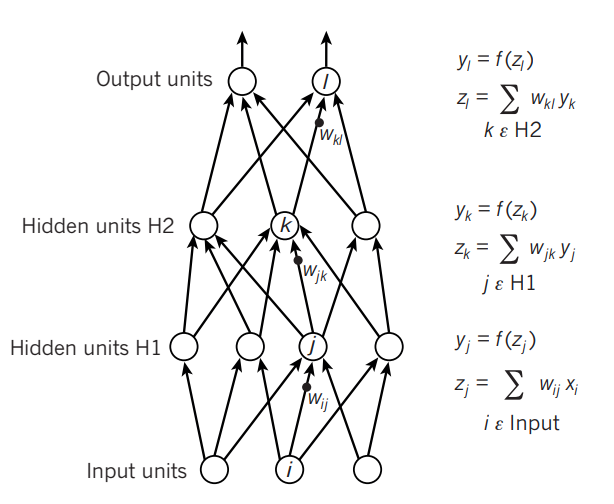
Forward pass in a neural net.
Backward pass in a neural net.
Convolutional neural networks
ConvNets are designed to process data that come in the form of multiple arrays, for example a colour image composed of three 2D arrays containing pixel intensities in the three colour channels. The architecture of a CNN is composed of convolution layers and pooling layers. The convolution layer makes use of filter banks to extract useful features. The pooling layers tries to combine semantically similar features into a single entity.
Image understanding with deep convolutional networks
ConvNets were largely forsaken by the mainstream computer-vision and machine-learning communities until the ImageNet competition in 2012. When deep convolutional networks were applied to a data set of about a million images from the web that contained 1,000 different classes, they achieved spec- tacular results, almost halving the error rates of the best competing approaches. Recent ConvNet architectures have 10 to 20 layers of ReLUs, hundreds of millions of weights, and billions of connections between units. Whereas training such large networks could have taken weeks only two years ago, progress in hardware, software and algorithm parallelization have reduced training times to a few hours.
Distributed representations and language processing
Deep-learning theory shows that deep nets have two different exponential advantages over classic learning algorithms that do not use distributed representations. Both of these advantages arise from the power of composition and depend on the underlying data-generating distribution having an appropriate componential structure. First, learning distributed representations enable generalization to new combinations of the values of learned features beyond those seen during training. Second, composing layers of representation in a deep net brings the potential for another exponential advantage(exponential in the depth). The hidden layers of a multilayer neural network learn to represent the network’s inputs in a way that makes it easy to predict the target outputs. The issue of representation lies at the heart of the debate between the logic-inspired and the neural-network-inspired paradigms for cognition. In the logic-inspired paradigm, an instance of a symbol is something for which the only property is that it is either identical or non-identical to other symbol instances. It has no internal structure that is relevant to its use; and to reason with symbols, they must be bound to the variables in judiciously chosen rules of inference. By contrast, neural networks just use big activity vectors, big weight matrices and scalar non-linearities to perform the type of fast ‘intuitive’ inference that underpins effortless commonsense reasoning.
Recurrent neural networks
RNNs process an input sequence one element at a time, maintaining in their hidden units a ‘state vector’ that implicitly contains information about the history of all the past elements of the sequence. RNN was primarily used in NLP and quickly blew to popular demand in the field. Although their main purpose is to learn long-term dependencies, theoretical and empirical evidence shows that it is difficult to learn to store information for very long. Hence, came the LSTM. LSTM networks have subsequently proved to be more effective than conventional RNNs, especially when they have several layers for each time step, enabling an entire speech recognition system that goes all the way from acoustics to the sequence of characters in the transcription. LSTM networks or related forms of gated units are also currently used for the encoder and decoder networks that perform so well at machine translation.
Over the past year, several authors have made different proposals to augment RNNs with a memory module. Proposals include the Neural Turing Machine in which the network is augmented by a ‘tape-like’ memory that the RNN can choose to read from or write to and many more.
The future of deep learning
The authors believe that unsupervised learning will come to light in the future and would be more powerful than supervised learning. Furthermore, the authors expect much of the future progress in vision to come from systems that are trained end-to-end and combine ConvNets with RNNs that use reinforcement learning to decide where to look. Systems combining deep learning and reinforcement learning are in their infancy, but they already outperform passive vision systems at classification tasks and produce impressive results in learning to play many different video games. We expect systems that use RNNs to understand sentences or whole documents will become much better when they learn strategies for selectively attending to one part at a time. Ultimately, major progress in artificial intelligence will come about through systems that combine representation learning with complex reasoning.